首页
关于我们
爱普生机器人
SCARA机器人
爱普生6轴机器人
自律型双臂机器人
爱普生控制器
爱普生机器人配件
爱普生机器人软件
技术支持
新闻资讯
行业动态
企业动态
技术资料
自学教程
联系我们
新闻资讯
行业动态
企业动态
技术资料
自学教程
产品推荐
MORE
爱普生Epson PROSIX S5-A901S (S5L) 多功能/高速机器人
爱普生Epson PROSIX C8-A701S (C8) 多功能/台式机器人
爱普生Epson PROSIX C8-A901S (C8L) 多功能/台式机器人
爱普生Epson PROSIX C8-A1401S (C8XL)多功能/台式机器
自学教程
当前位置:
主页
>
新闻资讯
>
自学教程
爱普生机器人示教编程自学教程指南(入门)
类别:自学教程
日期:2018-07-18 09:42:30
我要分享
一般来说,企业在购买了工业机器人设备之后都会聘请专人或由厂家指派技术人员来对机器人应用进行编程示教,但有时候,部分厂家、用户可能会选择培养自己的编程技术人员,或是为了节省成本而自己尝试编程。在此时,我们就需要一个合理、科学的自学教程来帮助我们了解工业机器人的编程方法和流程!
为了帮助用户更好的自学和掌握爱普生工业机器人的编程示教方法,笔者特整理了一系列爱普生机器人编程教程,供有需要的用户参考、学习!另外,此教程仅供入门、了解使用,如需深入学习,请报名专业培训班进行系统学习!
爱普生机器人示教编程自学教程()入门):了解爱普生机器人的方向坐标
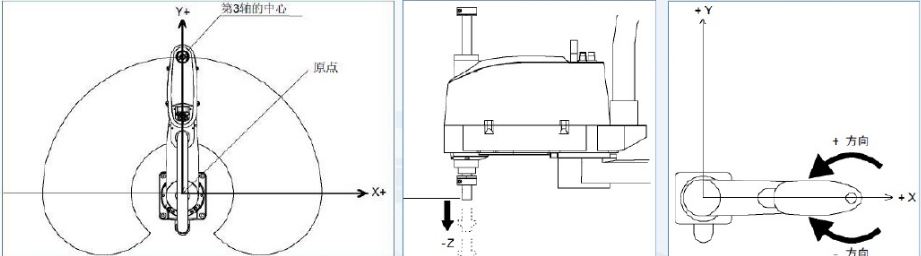
在正式学习如何对爱普生机器人进行编程示教之前,我们必须要先了解爱普生机器人的方向!由于爱普生机器人的大部分型号都是四轴机器人,所以在此我们以爱普生四轴机器人为例,爱普生的四轴机器人一般有四个方向:XY方向、Z方向及U方向。其中XY方向坐标为前后左右,而Z方向则外上下,U方向坐标为机器人末端轴旋转!我们在对机器人的运动进行编程设置时,便需要考虑到各个方向坐标的设置!
各方向坐标示意图如下:
(本图片截自百度文库文档,供参考学习使用,如果您认为侵犯了您的权益,请联系删除)
在了解了爱普生机器人的方向坐标之后,我们就要开始了解爱普生机器人的手臂姿势,根据不同的应用需求,我们需要控制爱普生机器人做出不同的姿势产生运动路径来完成工作。而在设置爱普生机器人的手臂姿势时,我们就需要对机械手的四个方向坐标进行设置。通过初始、抓取等多个任务点坐标的四个方向坐标设置,我们便可以控制机器人实现我们想要的运动路径,实现工作要求!
在对方向坐标和坐标系有所了解之后,我们就需要学习如何使用爱普生机器人编程软件来设置我们需要的参数,这一点我们将在后面的文章中提到,将会对爱普生机器人编程软件进行详细的介绍。如果您对此方面内容有所兴趣,欢迎关注我们的网站!
没有了
爱普生RC+7.0软件机器人编程控制软件说明书
返回
在线沟通,请点我
在线咨询
咨询热线:
18616728999
客服qq:
3267146135